GAIT CYCLE & DETERMINANTS
Reading File
Finding Sources
Finding Sources
Reading File
Reading File
Reading File
Reading File
Loading Image
Loading Image
Here is a comprehensive overview of the Gait Cycle and its Determinants, drawn from Miller's Review of Orthopaedics, 9th Edition.
THE GAIT CYCLE
Definition: One full gait cycle = heel strike to heel strike of the same foot = one stride.
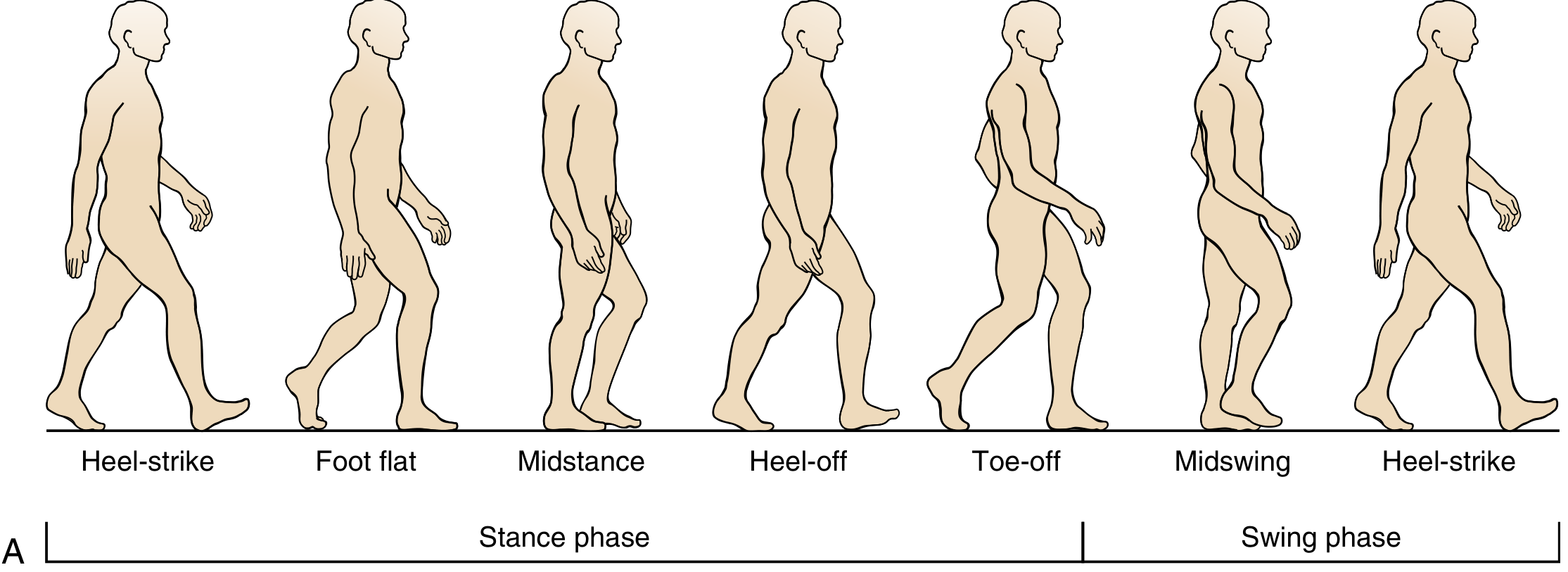
FIG. 6.10 — Normal phases of gait (Miller's Review of Orthopaedics)
Key Temporal Parameters
| Parameter | Value |
|---|---|
| Stance phase | 60–62% of gait cycle |
| Swing phase | 38–40% of gait cycle |
| Double-limb support | 20–30% of cycle (two periods) |
| Vertical displacement of CoM | ~5 cm (sinusoidal) |
| Lateral displacement of CoM | ~6 cm (sinusoidal) |
| Ground reaction force (walking) | ~1.5× body weight |
| Ground reaction force (running) | 3–4× body weight |
Walking is distinguished from running by the presence of at least one foot always in contact with the ground + a period of double-limb support. Running has a float phase (no foot on ground).
Phases of the Gait Cycle
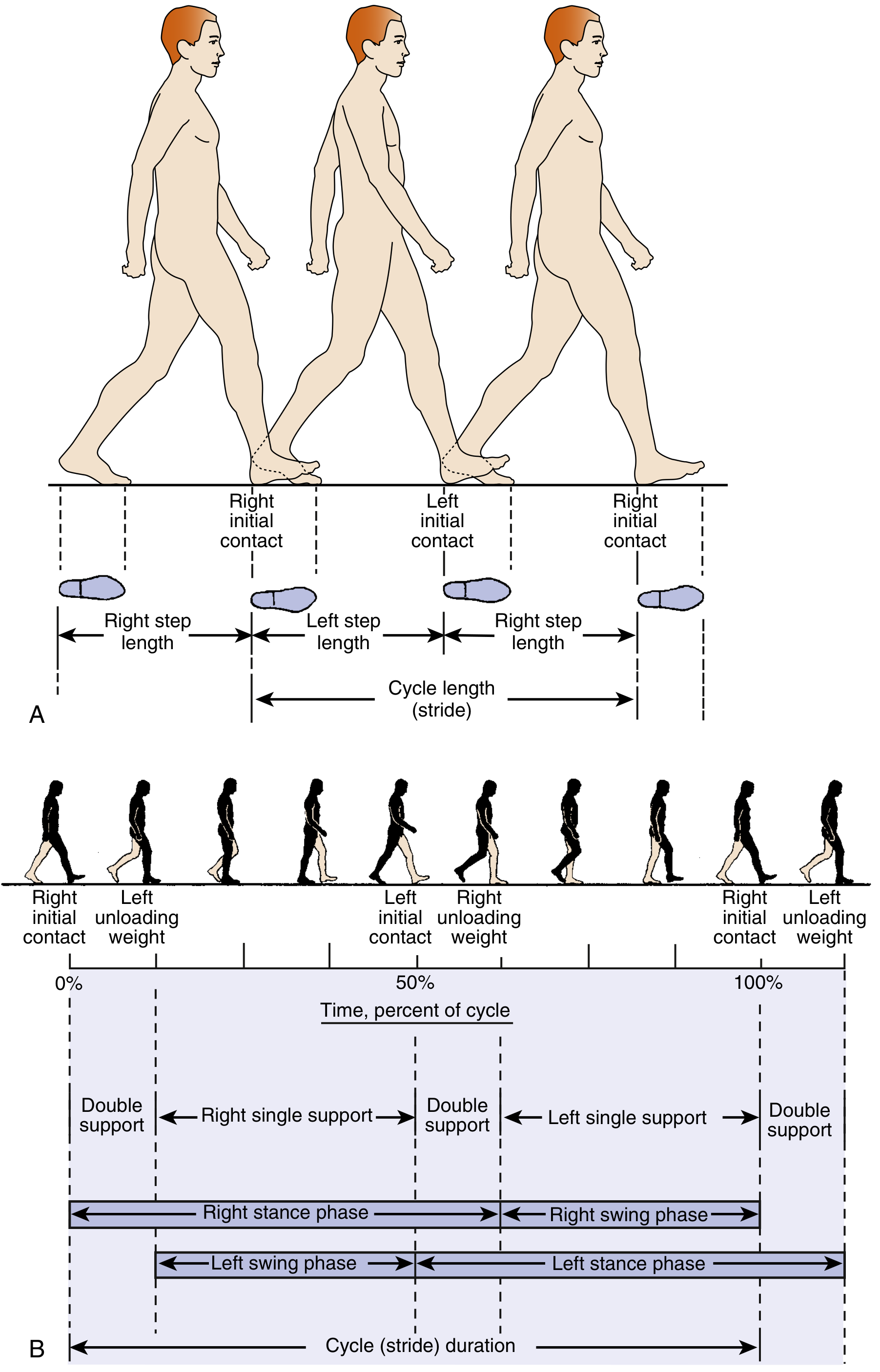
FIG. 10.1 — Dimensions of the walking cycle (Miller's Review of Orthopaedics)
STANCE PHASE (60%)
| Sub-phase | Description |
|---|---|
| Initial Contact (IC) | The instant the reference foot contacts the ground |
| Loading Response (LR) | From IC until contralateral foot begins initial swing; double-limb support |
| Midstance (MSt) | Begins when advancing foot initiates swing; ends when CoG is directly over supporting forefoot |
| Terminal Stance (TSt) | Begins with heel rise; continues until contralateral foot makes IC |
| Preswing (PSw) | From IC of contralateral limb until reference foot lifts off; second period of double-limb support |
SWING PHASE (40%)
| Sub-phase | Description |
|---|---|
| Initial Swing (ISw) | Reference foot leaves ground → swinging foot is opposite stance foot |
| Midswing | Ends when tibia is perpendicular/vertical to ground |
| Terminal Swing (TSw) | Tibia vertical → foot makes IC with ground |
Soft-Tissue Contributions by Phase
| Phase | Muscle/Structure | Action |
|---|---|---|
| Swing | Anterior tibialis | Concentric contraction; loss → foot drop / steppage gait |
| Heel strike | Anterior tibialis | Eccentric contraction; controls rate of foot strike; loss → foot slap |
| Heel strike | Hindfoot | Locked/inverted at strike → passively everts (energy absorption) |
| Foot flat | Gastrocnemius-soleus | Eccentric; controls forward progression; loss → calcaneus gait |
| Toe-off | Gastrocnemius-soleus | Concentric contraction; propulsion |
| Toe-off | Plantar fascia | Tightens as MTP joints extend → windlass mechanism locks transverse tarsal joint → rigid lever arm |
| Toe-off | Posterior tibialis (PTT) | Inverts hindfoot, locks transverse tarsal joint; PTT insufficiency → loss of push-off rigidity |
DETERMINANTS OF GAIT (Motion Patterns)
Six principal determinants work in concert to minimize vertical and lateral displacement of the center of mass, reducing energy expenditure. Three involve the pelvis, one each involves the knee, ankle/foot, and lateral pelvis control.
| # | Determinant | Mechanism |
|---|---|---|
| 1 | Pelvic Rotation | Pelvis externally rotates from IC to onset of preswing, internally rotates during PSw and swing. Net symmetric rotation minimizes vertical displacement needed for limb advancement. |
| 2 | Pelvic List (Tilt) | The non-weight-bearing (contralateral) side drops ~5°, reducing the superior deviation of the CoM. |
| 3 | Early Knee Flexion (at loading) | Stance-phase limb flexes ~15° at IC to dampen impact of initial loading. |
| 4 | Foot & Ankle Motion | Through the subtalar joint, damping of the loading response occurs → stability at midstance → efficiency of propulsion at push-off. |
| 5 | Knee Motion | Knee works in concert with foot/ankle; flexes at IC, extends at MSt to decrease unnecessary limb motion. |
| 6 | Control of Pelvic Lateral Displacement | During weight transfer onto the leading limb; ~5 cm of lateral motion over the weight-bearing limb narrows the base of support and increases stance-phase stability. |
Gait Dynamics — Ground Reaction Force (GRF)
- The GRF is the mean load-bearing vector, changing in magnitude and direction throughout the cycle.
- It determines the moment/torque at each joint, driving muscle activity patterns.
- Most muscle activity during gait is eccentric (muscle active while lengthening) — working with antagonists to control joint motion.
- Some muscle activity is concentric (shortening to move a joint through space).
- Isometric contractions also occur (constant muscle length during contraction).
Key Clinical Correlations
- Increased gait speed → stance phase decreases proportionally
- Cavovarus foot deformity → hindfoot fails to evert at heel strike → increased lateral foot forces → stress fractures (5th metatarsal), calluses, ankle instability
- Minimizing CoM displacement is the biomechanical goal of all six determinants — failure of any one leads to energy-inefficient, compensatory gait patterns
Source: Miller's Review of Orthopaedics, 9th Edition
This is a shared conversation. Sign in to Orris to start your own chat.